ЕБЧАЃЌЮвЙњЦћГЕЙЄвЕе§дкНјШыЕНЕкШ§ДЮдьГЩРЫГБЃЌаТвЛТжЕФдьГЕНзЖЮжївЊЪЧдкЕчЖЏЛЏЁЂжЧФмЛЏЁЂЛЅСЊЛЏЁЂЙВЯэЛЏЕФЧ§ЖЏЯТЃЌЮЊЦћГЕаТвЛТжЕФММЪѕИяаТЬсЙЉзюКУЕФжЇГжЁЃЦфжаЃЌвдаТФмдДЮЊДњБэЕФЕчЖЏЛЏКЭвдздЖЏМнЪЛЮЊДњБэЕФжЧФмЛЏПЊЗЂзїЮЊећИіММЪѕбаЗЂЕФКЫаФЃЌНЋНјвЛВНЭЦЖЏЦћГЕВњвЕБфИяЁЃ  БОЮФеыЖдаТФмдДЦћГЕжаЕФздЖЏМнЪЛПЊЗЂдРэНјааЯргІЕФЗжЮіЃЌжМдкДгаТФмдДгыздЖЏМнЪЛИїздКЫаФжаЭЙЯдЦфСНепМфЕФНЛЛЅдРэЁЃаТФмдДГЕаЭДгКсзнЯђПижЦНЧЖШЩЯНВгыДЋЭГГЕаЭзмЬхЪЧвЛжТЕФЃЌЦфЧјБ№дкгкЦфзнЯђПижЦжаашвЊГфЗжПМТЧЕНЖЏСІзмГЩгыздЖЏМнЪЛЯЕЭГЕФНЛЛЅЪЧВЩгУКЮжжЗНЪННјааЃЌФПЧАЃЌзнЯђПижЦТпМжагаСНжжЕфаЭЕФПижЦФЃЪНЃК ЦфвЛЃЌЪЧНЋећИізнЯђПижЦФЃПщЃЈVehicle Longitudinal ControlЃЌVLCЃЉЗХШыЕНздЖЏМнЪЛПижЦЦїЖЫЁЃИУПижЦЗНЪНЯТЃЌздЖЏМнЪЛПижЦЦїADSНЋМгЫйКЭМѕЫйЖШЗжПЊЗЂЫЭИјВЛЭЌЕФПижЦЦїЃЌЦфжаМгЫйПижЦХЄОиЗЂЫЭИјЖЏСІзмГЩПижЦЦїVCUЃЌМѕЫйЖШЗЂЫЭИјжЦЖЏзмГЩПижЦЦїEPBiЃЌСНепжДааЕФЧаЛЛЪБЛњЭъШЋгЩADSПижЦЃЌЧАУцЮФеТжаЖдИУЗНЪНвбгаЯъЪіЃЌетРяВЛдкетЦЊЮФеТзізИЪіЁЃ  ЦфЖўЃЌЪЧНЋГЕСОећИіКсзнЯђПижЦФЃПщЃЈVehicle Motion ControlЃЌVMCЃЉЗХШыЕНЕзХЬгђПижЦЦїжаЃЌгЩЕзХЬгђПижЦЦїЖдећИіКсзнЯђНјааПижЦЃЌЛЛОфЛАЫЕЃЌЁАГЕСОдЫЖЏПижЦЁБУшЪіСЫЖдГЕСОдЫЖЏЕФПижЦЃЌАќРЈзнЯђЃЌКсЯђКЭДЙжБдЫЖЏЁЃ Р§ШчЃЌЕБжЦЖЏЦїСЂМДЯьгІЪБЃЌЦћГЕдкЯСеЕФЭфЕРЩЯааЪЛЕУЛсБфЕУИќМгЫГГЉЃЌЛђепдкПгПгЭнЭнЕФХмЕРЩЯПЩвдПижЦзЊЯђСІОиДѓСІЕиНЋМнЪЛГЕСОРЕНвЛБпЃЛетаЉЖМгЩЕзХЬгђПижЦЦїЯЕЭГжаЕФИїИізщМўПЩвдЪЕЯжЕФПижЦЁЃ ДЫЭтЃЌЕзХЬгђПижЦЦїЛЙвЊИКд№Ч§ЖЏЦїжЪСПЃЌЧ§ЖЏЦїЖЏЬЌадКЭАВШЋадЁЃЦфжаЃЌгђПижЦШэМўЛЙашвЊГфЗжПМТЧЖдзнЯђЯрЙиаХКХЕФаХКХГѕЪМЛЏЁЂТЫВЈЁЂМфНгМЦЫуЁЂеяЖЯЕШЁЃ  гЩгкЕБЧАГЕСОПЊЗЂВЂЮДаЮГЩЭъећЧвГЩЪьЕФПЊЗЂТпМЃЌдкБОЮФжаВЛЖдДЫЗНАИзіЯрЙиНщЩмЁЃ ЦфШ§ЃЌЪЧНЋГЕСОзнЯђПижЦТпМЗжБ№ЗХШыЕзХЬжЦЖЏжДааПижЦЕЅдЊЃЌздЖЏМнЪЛПижЦЦїзїЮЊЕЅЖРЕФЩЯВуПижЦЕЅдЊЃЌжЛашвЊЗЂГіЯргІЕФМгЫйЖШФПБъашЧѓИјЕзХЬжЦЖЏжДааПижЦЕЅдЊЃЌЕзХЬЯЕЭГОпЬхИљОнЩЯВуЗЂЫЭЕФМгЫйЖШЧыЧѓЪЧЮЊе§жЕЛЙЪЧИКжЕХаЖЯжДааМгЫйХЄОиЛђМѕЫйжЦЖЏСІЗжХфТпМЁЃШчЯТНЋНсКЯаТФмдДГЕаЭжаЙигкжЦЖЏжДааВпТдНјааЯрЙидРэЫЕУїЁЃ 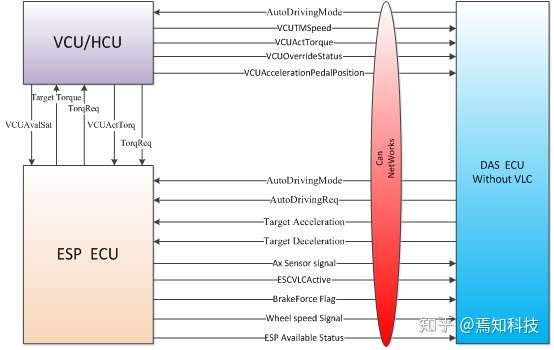 ШчЯТЭМЫљЪОБэЪОСЫздЖЏМнЪЛПижЦЦїDASгыЕзХЬжЦЖЏПижЦЦїЁЂЖЏСІзмГЩПижЦЦїаХКХНЛЛЅТпМЭМЁЃШчЯТНЋЗжБ№НсКЯDASЗЂЫЭМгЫйПижЦаХКХгыМѕЫйПижЦаХКХНјааЫЕУїжДааЦїЯргІдРэЁЃ знЯђМгЫйПижЦдРэ
ЕБжЦЖЏПижЦЦїESPECUДІгкПЩгУзДЬЌЪБЃЌЛсНЋЯргІЕФПЩгУзДЬЌЗЂЫЭИјDASПижЦЦїЃЌDASПижЦЦїНгЪеЕНИУаХКХКѓЃЌЛсЭЌЪБЗЂЫЭздЖЏМнЪЛМЄЛюаХКХAutoDrivingMode=ActiveИјESPЃЌДЫЪБНЈСЂЮеЪжаХЯЂЃЛ 2.DASМЦЫуМгМѕЫйЖШЃК здЖЏМнЪЛПижЦЦїDASЛсЭЌЪБИљОнЪЕМЪЬНВтЕНЧАЗНГЕСОЫйЖШЁЂМгЫйЖШЁЂОрРыЕШаХЯЂЃЌНсКЯздГЕГЕЩэЪ§ОнЃЈАќКЌЩшжУЫйЖШЁЂЪЕМЪЫйЖШЁЂМгЫйЖШЕШЃЉМЦЫуЕУЕНКЯЪЪЕиМгЫйЖШЃЌВЂЗЂЫЭИјESPECUЃЛ 3.DASгыVCUЮеЪжЃК ЕБDASХаЖЯгаМгЫйЧыЧѓЪБЃЌЛсЪзЯШНЋздЖЏМнЪЛПЩгУзДЬЌAutoDrivingMode=ActiveЗЂЫЭИјVCUЃЌVCUЪеЕНздЖЏМнЪЛМЄЛюзДЬЌКѓЃЌЕБЛЙЮДЪеЕНESPЗЂГіЕФМЄЛюХЄОиПижЦаХЯЂЪБЃЌгЩгкDASВЂЮДЗЂЫЭЯргІЕФХЄОиЧыЧѓИјVCUЃЌVCUЛсЪзЯШШЯЮЊЩЯВуЗЂГіХЄОиЮЊ0ЃЌЙЪДЫЪБЛсВЮееФПБъХЄОиЮЊ0НјааЯьгІЃЌVCUДЫЪБЛсНЋжЎЧАЕФХРааХЄОиЧхСуЃЌећГЕГіЯжХЄОиМБОчЯТНЕЕФЧщПіЁЃ 4.ESPгыVCUЮеЪжЃК ЕБESPECUХаЖЯПЊЪМЯьгІDASе§ЯђМгЫйЖШЧыЧѓКѓЃЌЛсМЦЫуЯргІЕФМгЫйдіХЄЧыЧѓTarget Torque>0МАЖдгІЕФХЄОиМЄЛюTorqReq=ActiveаХЯЂЃЌВЂЗЂЫЭИјVCUЁЃVCUНгЪеЕНИУаХЯЂКѓЃЌЛсЬсИпзЊЫйВЂЯьгІESPХЄОиЧыЧѓЃЌВЂЗДРЁжДаазДЬЌИјESPЁЃ знЯђМѕЫйПижЦдРэзнЯђМѕЫйПижЦЙ§ГЬдРэзмЬхЩЯгыЦфМгЫйПижЦдРэБЃГжвЛжТЃЌжЛЪЧЛсДцдкШчЯТВЛЭЌЃК ЕБDASИљОнЪЕМЪЬНВтЕНЧАЗНГЕСОЫйЖШЁЂМгЫйЖШЁЂОрРыЕШаХЯЂЃЌНсКЯздГЕГЕЩэЪ§ОнЃЈАќКЌЩшжУЫйЖШЁЂЪЕМЪЫйЖШЁЂМгЫйЖШЕШЃЉХаЖЯашвЊЖдздЩэГЕСОНјаажЦЖЏПижЦЪБЃЌDASЗЂЫЭЯргІЕФМѕЫйЖШЗЂЫЭИјESPECUЪБЃЌESPЪеЕНМѕЫйЧыЧѓКѓЃЌгЩгкVCUдкжЎЧАНгЪеЕНDASЗЂГіЕФФЃЪНаХКХКѓЃЌЦфХЄОивбОНЕЮЊ0ЃЌЙЪДЫЪБESPЛсдкVCUЮЊЛљДЁХЄОиЮЊ0ЕФЧАЬсЯТЃЌЗЂЫЭЯргІЕФНЕХЄЧыЧѓИјVCUЃЌМДTarget Torque<0МАTorqReq=ActiveЁЃ ДЫЪБЃЌVCUЪеЕНИУаХКХКѓНЋЕчЛњНјааЗДзЊЃЌВњЩњИКХЄОиЃЌЯьгІESPЗЂГіИКХЄОиЧыЧѓЁЃДЫЪБЃЌећИіГЕСОИљОнВњЩњЕФИКХЄОиДѓаЁВњЩњвЛЖЈЕФЗДЭЯМѕЫйЖШЃЌДЫЪБESPашвЊЫцЪБМрПижДааТжЖЫМѕЫйЖШЖдЩЯВуDASПижЦЦїЕФжДааИњЫцЧщПіЃЌЕБХаЖЯТжЖЫМѕЫйЖШИњЫцDASЗЂГіМѕЫйЖШВЛзувдТњзуадФмвЊЧѓЪБЃЌESPВЛдйвРППЗЂЫЭНЕХЄЧыЧѓИјVCUНјаажЦЖЏЃЌЖјЪЧПЊЪМПижЦТжИзНЈбЙВњЩњзуЙЛЕФжЦЖЏСІЁЃ 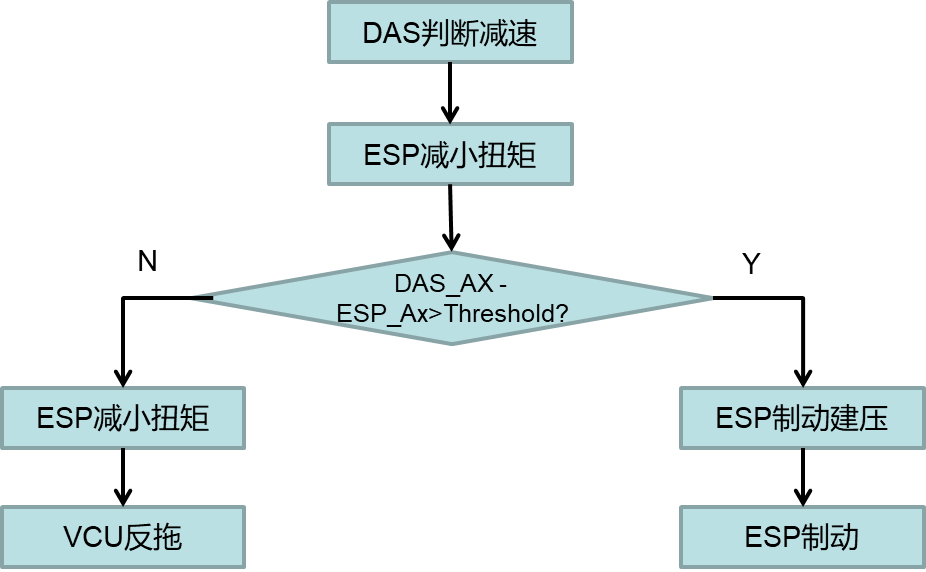 VCU/HCUМнЪЛадТЫВЈдкШчЩЯМгМѕЫйжДааЙ§ГЬжаЃЌESPЗЂГіЕФХЄОиЧыЧѓдкКмЖрЧщПіЯТЛсГіЯжвЛЖЈЕФХЄОиГхЛїЃЌГхЛїЕФдвђЪЧMCUжДааVCU/HCUЫљВњЩњЕФзЊЫйВЈЖЏЃЌЕБMCUзЊЫйЙ§ДѓЪБЃЌЛсдьГЩЯьгІНсЙћЕФВЛЦНЛЌЛђГіЯжГЕСОЖЖЖЏЕШВЛЪцЪЪЕШЧщПіЃЌвђДЫVCU ЛсШЋГЬЖдESC ЕФХЄОизіТЫВЈДІРэЃЌвЛАуЧщПіЯТЖМЪЧАДееГЕСОМнЪЛадТЫВЈНјааДІРэЃЌжївЊЙ§ГЬЪЧЩшжУТЫВЈЩЯЯТЯоЃЌЕБESPЗЂГіЕФХЄОиДцдкНЯДѓЕФБфЛЏСПЪБЃЌVCUТЫГ§ЦфЖЖЖЏВПЗжЃЌБЃСєТњзувЊЧѓЕФХЄОиВПЗжЁЃ 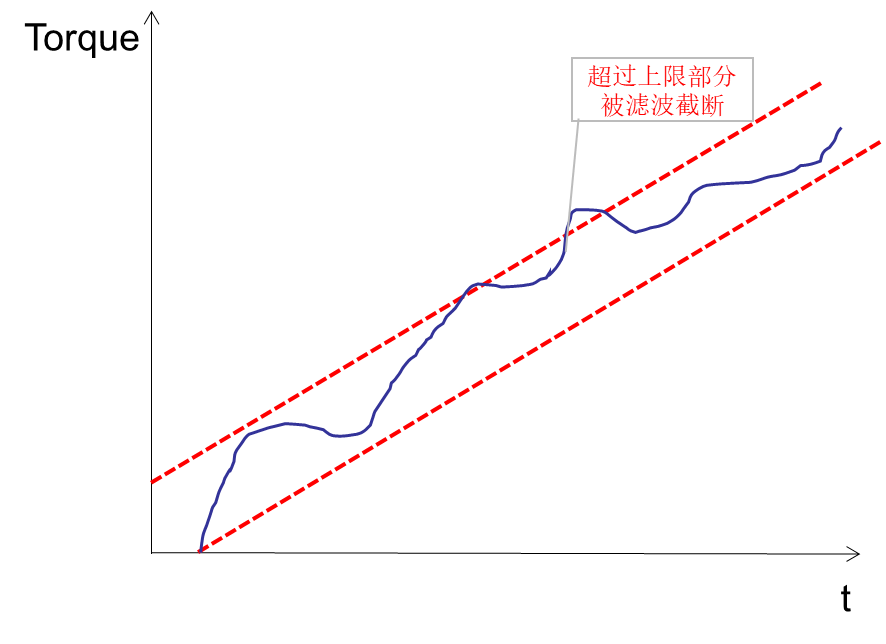 ШчЩЯЭМЃЌVCUТЫВЈХЄОиЕФЩЯЯТЯоПэЖШдНеЃЌЦфТЫВЈНсЙћдНЦНЛЌЃЌЦфЖдESPЗЂГіЕФХЄОиЯьгІдНТ§ЁЃетжжЧщПіЯТЃЌЖдгкМѕЫйЯьгІЪЧгаРћЕФЃЌвђЮЊПЩвдЙцБмМѕЫйЯьгІЗДЭЯЙ§ГЬжаЕФГхЛїЁЃVCUТЫВЈаБТЪдђЛсгАЯьЕНжДааЯьгІжаЕФХЄОиЯьгІЫйТЪЃЌЕБТЫВЈаБТЪдНДѓЪБЃЌБЃСєСЫESPЗЂГіХЄОижааБТЪНЯДѓЕФВПЗжЃЌЙЪVCU/HCUЖдESPХЄОиЧыЧѓЯьгІИќПьЃЌЖјЕБТЫВЈаБТЪдНаЁЃЌдђЖдESPЗЂГіХЄОиЯьгІЕФбгГйдНЖЬЃЌдкКмЖрМгЫйЧщПіЯТдђШнвзГіЯжМгЫйЯьгІбгГйЁЃДЫЭтЃЌгааЉЧщПіЯТЃЌVCUЕФТЫВЈВЛТњзужЦЖЏЯЕЭГашЧѓЪБЃЌдђ HCU ВЛНјааТЫВЈЃЌгЩжЦЖЏЯЕЭГздааТЫВЈКѓЗЂГіЪЪЕБЕФХЄОиЧыЧѓЁЃ ФмСПЛиЪеТпМдкVCUЕФПижЦЙ§ГЬжаЛсеыЖдВЛЭЌЕФЯьгІжДааНзЖЮВњЩњВЛЭЌЕФФмСПЛиЪеВпТдЃЌвЛАуЧщПіЯТЃЌФмСПЛиЪеЗжЮЊЛЌааФмСПЛиЪеКЭжЦЖЏФмСПЛиЪеЁЃШчЯТЭМЗжБ№БэЪОСЫЯЕЭГЛЌааФмСПЛиЪеКЭжЦЖЏФмСПЛиЪеЕФВЛЭЌНзЖЮЁЃ 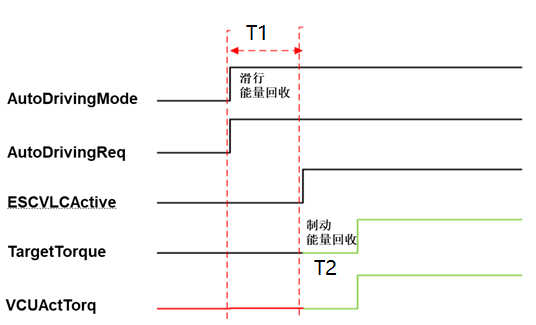 1.ЛЌааФмСПЛиЪеЃК ЛЌааФмСПЛиЪежївЊЪЧдкDASЗЂЫЭМѕЫйМгМѕЫйЧыЧѓКѓЃЌESPЛЙЮДМЄЛюНјаажЦЖЏЯьгІЧАЕФЙ§ЖЩНзЖЮЃЌДЫЪБЃЌЖдгкVCUЖјбдЪЧПЩвдПДГЩЫЩгЭУХЕФЃЌдкШчЩЯЭМЫљЪОЕФT1ЪБПЬЃЌгЩгкDASЖдгЭУХЕФПижЦЪЧЫВЪБЪегЭУХЕФЃЌЙЪЦфФмСПЛиЪеЕФЫйЖШЪЧВЛПЩЕїНкЕФЁЃ 2.жЦЖЏФмСПЛиЪеЃК жЦЖЏФмСПЛиЪежївЊЪЧжИЕБESPНгШыПЊЪМВњЩњжЦЖЏСІКѓЃЌVCUЫљНјааЕФЯрЙиФмСПЛиЪеЃЈШчЩЯЭМЫљЪОЃЌT2ЪБМфЖЮБэЪОГіСЫжЦЖЏФмСПЛиЪеНзЖЮЃЉЁЃЕчЛњЕФжЦЖЏФмСПЛиЪегаСНжжЗНЪНЪЕЯжЕФЃЌвЛИіЪЧЕќМгЪНдйЩњжЦЖЏЯЕЭГЃЈRBSЃЉЃЌвЛИіНаазїЪНдйЩњжЦЖЏЯЕЭГЃЈCRBSЃЉЁЃСНепзюДѓЕФЧјБ№ОЭЪЧЃКжЦЖЏЬЄАхЪЧЗёКЭжЦЖЏжДааЛњЙЙНтёюЃЈRBSНгёюЃЌCRBSНтёюЃЉЁЃдкЕчЖЏГЕЕФвЛИіжЦЖЏЙЄПіжаЃЌжЦЖЏСІОиЕФРДдДжЎвЛЪЧФІВСЦЌДјРДЕФЛњаЕжЦЖЏЃЌСэвЛИіРДдДдђЪЧЕчЛњЬсЙЉИКХЄОиЭЈЙ§ДЋЖЏжсРДЪЕЯжМѕЫйЃЌвВОЭЪЧЕчжЦЖЏЁЃжЛвЊЕчжЦЖЏЕФеМБШдНЖрЃЌдђОЭЛсгаИќЖрЕФЁАДХЩњЕчЁБЃЌБуПЩЛиЪеИќЖрЕФЕчСПЃЁ дкздЖЏМнЪЛЯЕЭГПижЦГЕСОааНјжаЃЌЕБГЕСОашвЊНјааМѕЫйЪБЃЌВЛЙмЪЧT1НзЖЮDASПижЦЖЊгЭУХЛЌааЛЙЪЧT2НзЖЮESPПижЦГЕСОжЦЖЏЃЌVCUЕчЛњгЩгкКЭГЕТжЛЙЪЧНтёюЕФЃЌзЊзггРДХЬхдкГЕТжКЭДЋЖЏЛњЙЙЕФДјЖЏЯТИпЫйа§зЊВЂЧвБЛЖЈзгШФзщЯпШІЧаИюДХИаЯпЃЌЖЈзгШЦзщВњЩњСЫЗДЯђИагІЕчСїЭЈЙ§ЕчЛњЛиГфЕНЕчГиЃЌВЂдкДЫЪБЖдзЊзгВњЩњЗДЯђХЄОиДгЖјзшжЙГЕСОЯђЧАааНјЃЌвдДЫЪЕЯжГЕСОМѕЫйЃЌвВОЭЪЧЩЯУцЫљЫЕЕФДХЩњЕчЦфФмСПЛиЪеНзЖЮвВЛсЖджДааЯьгІВњЩњВЛЭЌЕФгАЯьЁЃ ДЫЭтЃЌФмСПЛиЪеЕФЧПШѕЛсбЯжигАЯьЕНздЖЏМнЪЛЯЕЭГПижЦЕФжДаааЇТЪЁЃвЛАуЕиЃЌФмСПЛиЪеЬЋЧПЃЌГЕСОЛЙУЛгаДяЕНМШЖЈЮЛжУЩЯБувЊЭЃГЕСЫЃЌашвЊдйДЮМгЫйВХПЩвдДяЕНФПЕФЕиЃЌЕчФмНјааСНДЮжиЗХЃЌзЊЛЛаЇТЪВюЁЃФмСПЛиЪеЬЋШѕЃЌГЕСОЕНДяМШЖЈЮЛжУЛЙгаГЕЫйЃЌашвЊВШЩВГЕЃЌЭЃдкФПБъЮЛжУЃЌдьГЩШШФмЫ№ЪЇЁЃ вђДЫздЖЏМнЪЛжаЃЌVCUашвЊОЋзМЕФеЦЮеФмСППижЦЕФжДаааЇТЪЃЌВЛвЊГіЯжвђЮЊФмСППижЦЕМжТжДааЦЋВюЁЃ змНсБОЮФеыЖдаТФмдДЦћГЕжаЕФздЖЏМнЪЛЯЕЭГПижЦТпМНјааСЫЯргІЕФдРэЗжЮіЃЌзнЯђТпМПижЦжївЊЪЧАќКЌдкжЦЖЏжДааПижЦЕЅдЊгыЖЏСІЯЕЭГЕФХЄОиНЛЛЅвдМАжЦЖЏПижЦЯЕЭГЕФжЦЖЏЧаШыжДааВпТдЁЃЦфжаЃЌашвЊжиЕуПМТЧНЛЛЅЙ§ГЬжажЦЖЏжДааЕЅдЊЯрЙиЕФХЄОиЗжХфКЭжЦЖЏСІЗжХфЮЪЬтЃЌЦфжаЙигкФмСПЛиЪевВПЩФмгАЯьЕНЯЕЭГЯьгІНсЙћЃЌашвЊЕЅЖРНјааЗжЮіЁЃ |




